There are 18 parts with editable properties, all of which can be found in either the Powered Category or the Cosmetic Category - DC Motor Properties, Servo Motor Properties, Small Piston Properties, Small Telescoping Piston Properties, Large Piston Properties, Large Telescoping Piston Properties, Laser Pointer Properties, Powered LED Properties, Vacuum Properties, Powered Pincer Properties, Powered Claw Properties, Text Screen Properties, Microcontroller Properties, Touch Sensor Properties, Force Sensor Properties, Inertial Motion Sensor Properties, Distance Sensor Properties, and Light Bulb Properties.
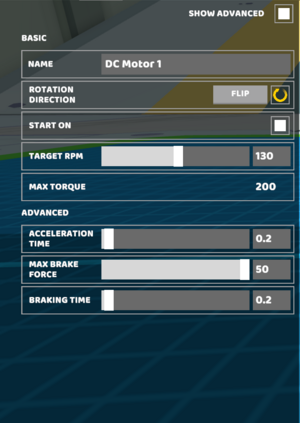
DC Motor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Rotational Direction
|
Determines whether the motor spins clockwise or counter-clockwise
|
CW/CCW
|
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
| Target RPM
|
Rotational velocity (RPM) will try to reach at maximum input
|
0-500
|
| Max Torque
|
Max torque (turning effect) can apply to reach its target RPM. Resize motor to increase
|
0-20000
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity
|
0-10
|
| Max Break Force
|
Max force the motor will apply while breaking
|
0-5000
|
| Breaking Time
|
How long it takes to reach max break force when no input is applied
|
0-10
|
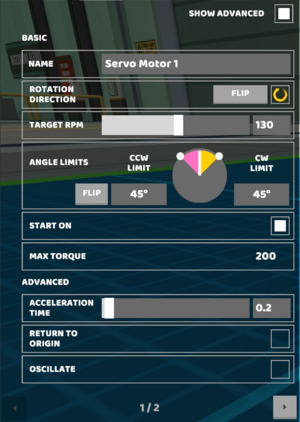
Servo Motor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Rotational Direction
|
Determines whether the motor spins clockwise or counterclockwise
|
CW/CCW
|
|
| Target RPM
|
Rotational velocity (RPM) will try to reach at maximum input
|
0-500
|
| Angle Limits
|
How far the motor can spin in each direction
|
0-180, CW/CCW
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
| Max Torque
|
Max torque (turning effect) can apply to reach its target RPM. Resize motor to increase
|
0-2000
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity
|
0-10
|
| Return to Origin
|
Will return to origin when it is not receiving input
|
On/Off
|
| Oscillate
|
Will move back and forth between min and max positions
|
On/Off
|
| Map to Angle
|
Input is mapped from min to max angles
|
On/Off
|
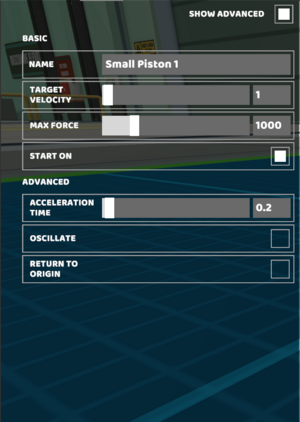
Small Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input
|
0-100
|
|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity
|
0-5000
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity
|
0-10
|
| Oscillate
|
Will move back and forth between min and max positions
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input
|
On/Off
|
Small Telescoping Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input
|
0-100
|

|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity
|
0-5000
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity
|
0-10
|
| Oscillate
|
Will move back and forth between min and max positions
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input
|
On/Off
|
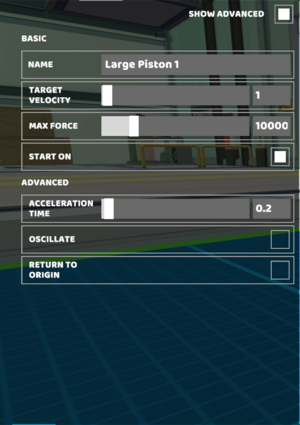
Large Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input
|
0-100
|
|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity
|
0-50000
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity
|
0-10
|
| Oscillate
|
Will move back and forth between min and max positions
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input
|
On/Off
|
Large Telescoping Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input
|
0-100
|

|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity
|
0-50000
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity
|
0-10
|
| Oscillate
|
Will move back and forth between min and max positions
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input
|
On/Off
|
Laser Pointer Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|

|
Powered LED Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|

|
| Pulse
|
Sets the LED to either pulse or provide constant light
|
On/Off
|
| Pulse Time
|
Adjusts the rate of pulsing on the Powered LED
|
0-10
|
Vacuum Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Power
|
Power of the vacuum to suck in nearby objects
|
0-10
|

|
| Airflow Direction
|
Set the vacuum to normal or reverse airflow on start
|
CW/CCW
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
Powered Pincer Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Max Force
|
Max force the claw exerts when opening and closing
|
0-10000
|

|
| Start Closed
|
Sets the claw to start in Open or Closed position
|
On/Off
|
Powered Claw Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Max Force
|
Max force the claw exerts when opening and closing
|
0-10000
|

|
| Start Closed
|
Sets the claw to start in Open or Closed position
|
On/Off
|
Text Screen Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Text
|
The text that will be displayed on the screen
|
Alphabetical and Numerical Characters
|

|
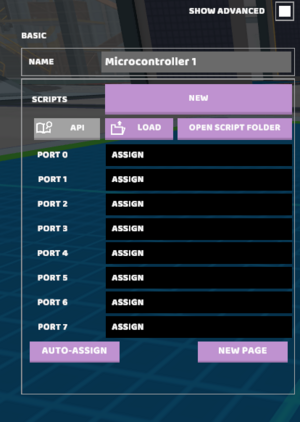
Microcontroller Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| New Script
|
Create a new script file and load it
|
.txt file
|
|
| API
|
Custom API instructions to assist with Python coding
|
|
| Load Script
|
Load a script to use on this robot
|
.txt file
|
| Open Script Folder
|
Opens an external window to the robot's script folder
|
|
| Port
|
A port where you assign a connected part
|
|
| Auto-Assign
|
Auto-assign a port to all unassigned configurable parts
|
|
| New Page
|
Create a new page of ports to assign controllable parts to
|
|
Touch Sensor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Max Force
|
Maximum force that the sensor can sense
|
0-30
|

|
Inertial Motion Sensor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Account for Gravity
|
Will the sensor add in a factor for gravity so that stationary objects don't read as accelerating upwards against gravity
|
On/Off
|

|
Touch Sensor
Turret
| Basic Properties
|
Description
|
Value
|
Example
|
| Power
|
Power of the turret to shoot balls
|
1-5
|

|
| EMIT Rate
|
Time between emissions
|
1-10
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
Bubble Machine
| Basic Properties
|
Description
|
Value
|
Example
|
| EMIT Rate
|
Time between emissions
|
1-10
|

|
| Particles Per Emission
|
How many bubbles are blown out
|
1-5
|
| Start On
|
Sets the part to start ON or OFF
|
On/Off
|
Light Bulb Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Start On
|
Decide whether you want the light bulb to start on or off
|
On/Off
|

|
| Pulse
|
Decide whether you want the light to pulse on and off
|
On/Off
|
| Pulse Time
|
Decide how often you want the light bulb to pulse
|
0-10
|















{kind=link}


