There are 19 parts with editable properties, all of which can be found in either the Powered Category or the Cosmetic Category.
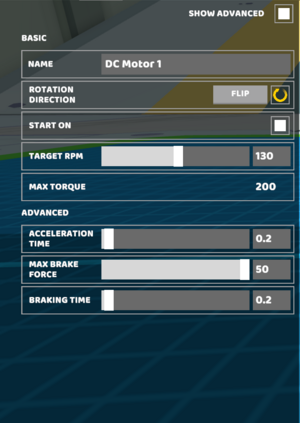
⚙ DC Motor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Rotational Direction
|
Determines whether the motor spins clockwise or counter-clockwise.
|
CW/CCW
|
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
| Target RPM
|
Rotational velocity (RPM) will try to reach at maximum input.
|
1-500
|
| Max Torque
|
Max torque (turning effect) can apply to reach its target RPM. Resize motor to increase.
|
200-20000
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity.
|
1-10
|
| Max Brake Force
|
Max force the motor will apply while braking.
|
1-50
|
| Braking Time
|
How long it takes to reach max brake force when no input is applied.
|
1-10
|
Back to Top
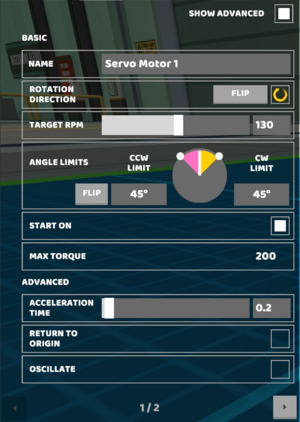
⚙ Servo Motor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Rotational Direction
|
Determines whether the motor spins clockwise or counterclockwise.
|
CW/CCW
|
|
| Target RPM
|
Rotational velocity (RPM) will try to reach at maximum input.
|
1-500
|
| Angle Limits
|
How far the motor can spin in each direction.
|
0-180, CW/CCW
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
| Max Torque
|
Max torque (turning effect) can apply to reach its target RPM. Resize motor to increase.
|
200-20000
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity.
|
1-10
|
| Return to Origin
|
Will return to origin when it is not receiving input.
|
On/Off
|
| Oscillate
|
Will move back and forth between min and max positions.
|
On/Off
|
| Map to Angle
|
Input is mapped from min to max angles.
|
On/Off
|
Back to Top
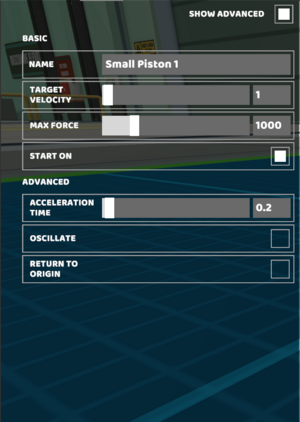
⚙ Small Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input.
|
1-100
|
|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity.
|
1-3750
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity.
|
1-10
|
| Oscillate
|
Will move back and forth between min and max positions.
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input.
|
On/Off
|
Back to Top
⚙ Small Telescoping Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input.
|
1-100
|

|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity.
|
1-5000
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity.
|
1-10
|
| Oscillate
|
Will move back and forth between min and max positions.
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input.
|
On/Off
|
Back to Top
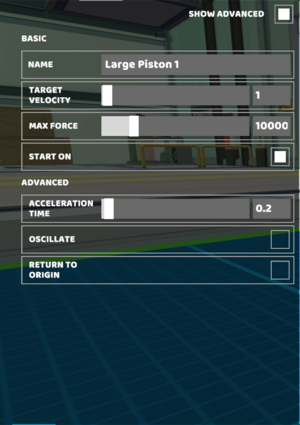
⚙ Large Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input.
|
1-100
|
|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity.
|
1-50000
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity.
|
1-10
|
| Oscillate
|
Will move back and forth between min and max positions.
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input.
|
On/Off
|
Back to Top
⚙ Large Telescoping Piston Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Target Velocity
|
Velocity that the piston will try to reach at maximum input.
|
1-100
|

|
| Max Force
|
Max force that the piston will apply while trying to reach its target velocity.
|
1-37500
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
| Advanced Properties
|
Description
|
Value
|
| Acceleration Time
|
How long it takes to accelerate from 0 to max velocity.
|
1-10
|
| Oscillate
|
Will move back and forth between min and max positions.
|
On/Off
|
| Return to Origin
|
Will return to origin when it's not receiving input.
|
On/Off
|
Back to Top
⚙ Laser Pointer Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|

|
Back to Top
⚙ Powered LED Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|

|
| Pulse
|
Sets the LED to either pulse or provide constant light.
|
On/Off
|
| Pulse Time
|
Adjusts the rate of pulsing on the Powered LED.
|
1-10
|
Back to Top
⚙ Vacuum Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Power
|
Power of the vacuum to suck in nearby objects.
|
1-10
|

|
| Airflow Direction
|
Set the vacuum to normal or reverse airflow on start.
|
CW/CCW
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
Back to Top
⚙ Powered Pincer Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Max Force
|
Max force the claw exerts when opening and closing.
|
1-10000
|

|
| Start Closed
|
Sets the claw to start in Open or Closed position.
|
On/Off
|
Back to Top
⚙ Powered Claw Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Max Force
|
Max force the claw exerts when opening and closing.
|
1-10000
|

|
| Start Closed
|
Sets the claw to start in Open or Closed position.
|
On/Off
|
Back to Top
⚙ Text Screen Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Text
|
The text that will be displayed on the screen.
|
Alphabetical and Numerical Characters
|

|
Back to Top
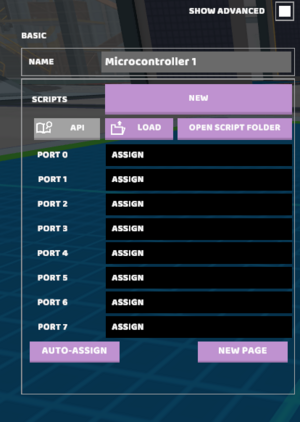
⚙ Microcontroller Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| New Script
|
Create a new script file and load it.
|
.txt file
|
|
| API
|
Custom API instructions to assist with Python coding.
|
NA
|
| Load Script
|
Load a script to use on this robot.
|
.txt file
|
| Open Script Folder
|
Opens an external window to the robot's script folder.
|
NA
|
| Port
|
A port where you assign a connected part.
|
NA
|
| Auto-Assign
|
Auto-assign a port to all unassigned configurable parts.
|
NA
|
| New Page
|
Create a new page of ports to assign controllable parts to.
|
NA
|
Back to Top
⚙ Touch Sensor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Max Force
|
Maximum force that the sensor can sense.
|
1-30
|

|
Back to Top
⚙ Inertial Motion Sensor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Account for Gravity
|
Toggles whether the sensor will factor for gravity so that stationary objects don't read as accelerating upwards against gravity.
|
On/Off
|

|
Back to Top
⚙ Distance Sensor Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Visible Laser
|
Add a visible component to the Infared laser.
|
On/Off
|

|
Back to Top
⚙ Turret Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Power
|
Determines the force applied when the turret fires.
|
1-5
|

|
| EMIT Rate
|
The rate at which the turret fires.
|
1-10
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
Back to Top
⚙ Bubble Machine Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| EMIT Rate
|
The speed at which bubbles are blown out.
|
1-10
|

|
| Particles Per Emission
|
How many bubbles are blown out.
|
1-5
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|
Back to Top
⚙ Light Bulb Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Start On
|
Sets the part to start ON or OFF.
|
On/Off
|

|
| Pulse
|
Sets the light bulb to pulse on and off.
|
On/Off
|
| Pulse Time
|
Sets frequency of light bulb pulse.
|
0-10
|
⚙ Decoupler Properties
| Basic Properties
|
Description
|
Value
|
Example
|
| Ejection Force
|
Force with which the decoupler separates its two halves (newtons).
|
0.01 - 50
|

|
Back to Top
⚙ Chatterbox
| Basic Properties
|
Description
|
Value
|
Example
|
| Targeted Range
|
Length of cone indicating how far targeted commands will reach (meters).
|
1-8
|

|
| Area Range
|
Diameter of sphere indicating how far area commands will reach (meters).
|
1-8
|
| Voice Set
|
What your robot sounds like when giving a command.
|
AA7, DODO, Sid, Vox Bot, Ada
|
Back to Top
⚙ Seat
| Basic Properties
|
Description
|
Value
|
Example
|
| Auto Open/Close
|
Automatically closes or opens the lap-bar restraint.
|
On/Off
|

|
Back to Top























