Joint connections are generated by connecting parts in RoboCo, and determine how those two parts interact with each other. These connections can be altered using the Joints Tool to select and cycle through connections using the [Q] and [E] keys. The Joints Tool is located at the bottom of the RoboCo Interface.
⚙ Surface Joints
| Name
|
Description
|
Example
|
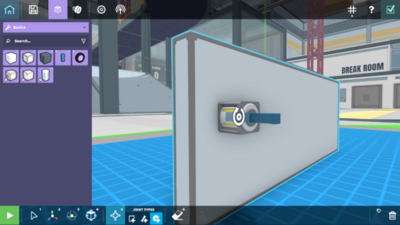
| Fixed
|
A fixed attachment between parts
|
|
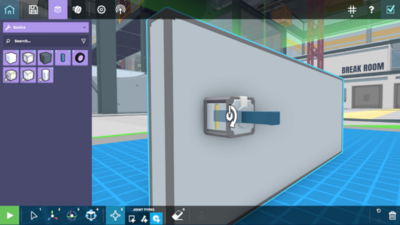
| Rotate
|
A rotating attachment between parts
|
|
| Disconnected
|
This indicates that there is no joint between selected parts
|
|
⚙ Rod Joints
| Name
|
Description
|
Example
|
| Slide
|
A sliding attachment between a robot and another part
|
|
| Slide and Rotate
|
A sliding and rotating attachment between a rod and another part
|
|
| Fixed
|
A fixed attachment between a rod and another part
|
|
| Rotate
|
A rotating attachment between a rod and another point
|
|
| Disconnected
|
This indicates that there is no joint between a selected rod and part
|
|
⚙ Mechanical Joints
| Name
|
Description
|
Example
|
| Rotate
|
A rotating attachment between a rod and DC motor
|
|
| Rotate (with Angle Limits)
|
A rotating attachment between a rod and Servo motor with angle limits
|
|


